Diario delle lezioni (AA 11-12)
(“Si quid forte minus aut plus iusto vel necessario intermisi, mihi deprecor indulgeatur,
cum nemo sit qui vitio careat et
in omnibus undique sit circumspectus”,
Leonardo Pisano, Liber
Abaci)
In questo spazio saranno annotati, più o meno quotidianamente e per sommi capi, gli argomenti svolti a lezione. Tra parentesi quadre i riferimenti alla bibliografia. I principali testi di riferimento sono i primi due. Gli altri della lista sono comunque dei buoni testi. Gli studenti sono invitati a risolvere gli esercizi proposti e, volendo, sottoporre a me, via posta elettronica, delle soluzioni da condividere, su questa pagina, con gli altri studenti del corso. Le soluzioni possono anche essere scritte a mano, ma in ogni caso devono essere scritte in maniera ordinata e leggibile. Vi ringrazio inoltre se vorrete segnalare eventuali imprecisioni o errori sia su queste pagine che sul libro di testo.
Lezione 1 (26-09-2011)
Cenni
introduttivi di carattere storico: il postulato delle parallele, Bolyai, Lobachevsky, Gauss, Galois, Riemann, Klein.
Richiami su insiemi e
operazioni su insiemi. Prodotto cartesiano di due
insiemi. Corrispondenze, Relazioni. Funzioni o applicazioni. Applicazioni
iniettive, suriettive, biiettive. [1, Cap.1]. Esercizi
Lezione 2 (27-09-2011)
Relazioni di equivalenza.
Partizione di un insieme. Congruenza modulo n. Definizione astratta di spazio
vettoriale. Otto assiomi dello spazio vettoriale.
[1, Cap.2]. Esercizi
Soluzioni
Lezione 3 (28-09-2011)
Rn come spazio vettoriale. Combinazione lineare.
Sottospazio vettoriale di Rn. Sottospazio generato da alcuni vettori.
Dipendenza e indipendenza lineare. Basi
di un sottospazio vettoriale. Dimensione di un sottospazio. [1,
Cap.2]. Esercizi
Lezione 4 (29-09-2011)
Espressione
unica di un vettore in termini di vettore di una base. Base canonica di Rn. Prodotto scalare
di Rn. e sue proprietà.
Matrici. Addizione di matrici. Moltiplicazione per uno
scalare. Insieme M(mxn, R ) come spazio vettoriale. Moltiplicazione riga per colonna di
matrici. Proprietà della moltiplicazione di matrici. Conseguenze della non
commutatività. Definizione di matrici idempotenti e nilpotenti.[2. Paragrafi 1.1,1.2]. Esercizi
Lezione 5 (30-09-2011)
Ancora sulla moltiplicazione
tra matrici. Matrici a blocchi. Interpretazione di un sistema di equazioni
lineari mediante moltiplicazione di matrici. Moltiplicazione di una matrice A
di ordine mxn per una B di
ordine nx1 interpretata come
combinazione lineare delle colonne di A.
Trasposta di una
matrice. Definizione di matrice simmetrica. Panoramica sui metodi elementari di
risoluzione di sistemi di equazioni lineari.
Definizione di determinante mediante i prodotti
competenti e le permutazioni. Casi particolari 2x2 e 3x3. Regola di Sarrus. Sviluppo secondo Laplace. Primo teorema di Laplace.
Matrici diagonali. Triangolari superiori, inferiori. Diagonale a blocchi. Esercizi e complementi.
Lezione 6 (3-10-2011)
Proprietà dei determinanti.
Invertibilità di una matrice e determinanti. Aggiunta
di una matrice. Formula della matrice inversa. Soluzione di un sistema mediante
la regola di Cramer.
Lezione 7 (4-10-2011)
Operazioni elementari sulle equazioni di
un sistema o sulle righe di una matrice. Matrice completa. Forma a
gradini di una matrice. Forma a gradini ridotta. Pivot. Rango per pivot di una
matrice. Metodo di eliminazione di Gauss o di Gauss-Jordan per la risoluzione dei sistemi lineari.
Esercizi e complementi Utile pagina web (in inglese)
Lezione 8 (5-10-2011)
Minori di una matrice. Rango per minori di una matrice. Estensione del metodo di Cramer alla
soluzione di sistemi lineari non necessariamente quadrati. Teorema degli
orlati. Teorema di Rouché-Capelli. Esercizi e complementi
Lezione 9 (6-10-2011)
Algoritmo di inversione: calcolo
dell’inversa di una matrice mediante la riduzione di Gauss-Jordan.
Sistemi lineari omogenei (SLO). Autosoluzioni.
Condizioni per l’esistenza di autosoluzioni.
L’insieme delle soluzioni di un SLO come sottospazio
vettoriale di Rn.
Esercizi
Lezione 10 (7-10-2011)
Esercizi sull’algoritmo di inversione.
Confronto tra l’algoritmo di Gauss e l’uso del determinante.
Inversa di un prodotto di matrici invertibili. Esercizi
e complementi (Vedere anche per un confronto tra i due metodi: Confronto (in inglese) ) Esercizio
Lezione 11 (10-10-2011)
Teorema sulle condizioni equivalenti di invertibilità
di una matrice. Matrici invertibili e
matrici elementari. Esercizi
Lezione 12 (11-10-2011)
Dimostrazione del teorema di Binet.
Dimostrazione della condizione di invertibilità legata
al determinante. Dimostrazione della regola di Cramer.
Esercizi e complementi
Lezione 13 (12-10-2011)
Introduzione alla diagonalizzazione
di matrici attraverso esempi. Definizione di autovalore,
autovettore, autospazio,
polinomio caratteristico, equazione caratteristica.
Esempio nel caso di matrici 2x2. Applicazione alla successione di Fibonacci. Esercizi e complementi
Lezione 14 (13-10-2011)
Ancora esempi di diagonalizzazione
di matrici. Caso 3x3. Molteplicità algebrica e molteplicità
geometrica. Polinomio caratteristico e
sua relazione con la traccia e il determinante di una
matrice. Legame tra il rango della
matrice e la dimensione dell’autospazio. Esercizi e complementi
Lezione 15 (14-10-2011)
Caso di matrici in cui la
molteplicità algebrica è diversa dalla molteplicità
geometrica. Condizioni necessarie e sufficienti per la diagonalizzazione.
Diagonalizzazione di una matrice con autovalori distinti. Teorema di Cayley-Hamilton
e qualche sua conseguenza. Esercizi e
complementi Ancora su Fibonacci
Lezione 16 (17-10-2011)
Spazio delle righe e spazio delle colonne di una matrice. Rango per righe e rango per colonne. Equivalenza dei differenti concetti di
rango. Successioni di Fibonacci come esempio di spazio vettoriale di dimensione
2 e sue conseguenze. Qualche richiamo sui numeri
complessi.
(Per approfondimenti sul problema di Collatz
vedere: http://arxiv.org/PS_cache/math/pdf/0309/0309224v13.pdf
Vedere anche la pagina http://it.wikipedia.org/wiki/Congettura_di_Collatz
oppure
http://en.wikipedia.org/wiki/Collatz_conjecture
che contiene maggiori informazioni e diagrammi)
Lezione 17 (18-10-2011)
La lezione si è svolta in
maniera molto ridotta a causa del ritardo del docente. La lezione sarà
recuperata quanto prima probabilmente in uno degli orari disponibili per il
tutor. La data più probabile è venerdì 28 ottobre. Soluzione di alcuni esercizi della lezione
precedente v. anche alcuni
numeri complessi per l'esercizio
Lezione 18 (19-10-2011)
Spazio vettoriale V2.
Dipendenza e indipendenza lineare in V2. Interpretazione geometrica
dell’indipendenza. Coordinate di un vettore di V2 rispetto ad una base. Base ortonormale e sistema cartesiano
ortogonale di riferimento RC(O,i,j). Identificazione di
V2 con R2.
Prodotto scalare su V2 e su R2.
Esercizi
Lezione 19 (20-10-2011)
Condizione di parallelismo
tra due vettori di del piano. Espressione della
lunghezza di un vettore tramite il prodotto scalare. Distanza tra due punti.
Espressione dell’angolo compreso tra due vettori mediante il prodotto
scalare. Area di un triangolo: formula
del determinante. Condizione di allineamento di tre
punti. Equazione cartesiana di una retta. Equazione parametrica di una retta.
Relazione tra i parametri direttori e il coefficiente angolare. Esercizi e complementi
Lezione 20 (21-10-2011)
Componente ortogonale di un vettore secondo una direzione.
Proiezione ortogonale e coefficiente di Fourier. Condizione di parallelismo tra
due vettori di del piano. Espressione della lunghezza
di un vettore tramite il prodotto scalare. Distanza tra due punti. Espressione
dell’angolo compreso tra due vettori mediante il prodotto scalare. Area di un triangolo: formula del determinante. Condizione di allineamento di tre punti.
Equazione cartesiana di una retta. Equazione parametrica di una retta. (N.B. La lezione è stata in parte ripetuta a causa dei
problemi “atmosferici” della giornata di ieri) Esercizi
Lezione 21 (24-10-2011)
Parametri direttori. Coseni
direttori definizione e interpretazione geometrica. Condizione di parallelismo
e di perpendicolarità tra due rette. Formula della distanza punto-retta. Esercizi
Lezione 22 (25-10-2011)
Definizione di applicazione
lineare tra due spazi vettoriali. Un’applicazione lineare è determinata dai
valori assunti su una base. Qualche esempio importante di operatore lineare su V2 :
rotazione e proiezione ortogonale. Matrici che rappresentano l’operatore di
rotazione e l’operatore di proiezione ortogonale.
Definizione di matrice ortogonale. Esercizi
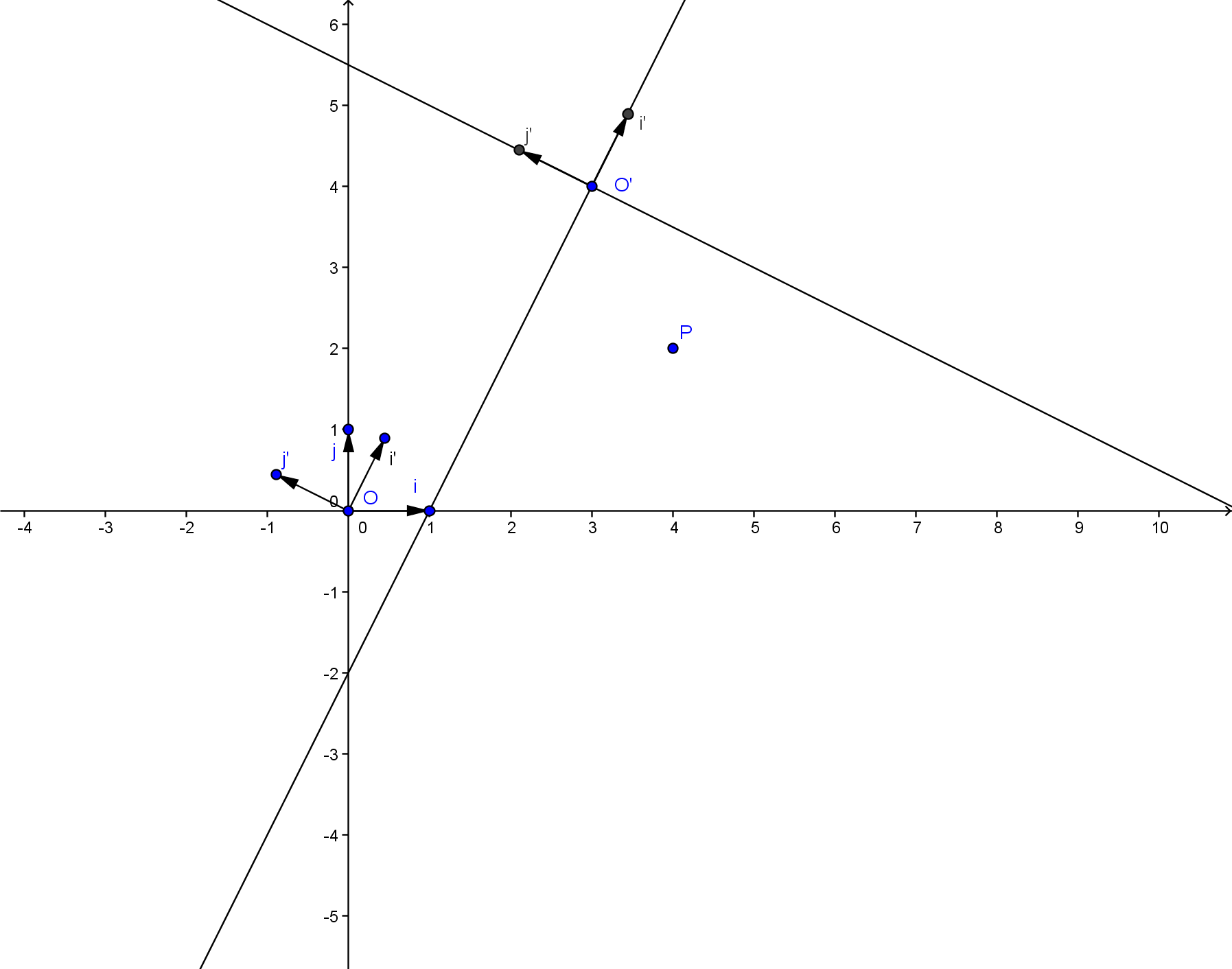
Lezione 23 (26-10-2011)
Formule per un cambiamento di
riferimento cartesiano ortogonale. Basi equiverse e contraverse.
Esercizi e
complementi Figura 1
Lezione 24 (27-10-2011)
Introduzione alle sezioni
coniche. Definizione di ellisse, iperbole e parabola come luoghi geometrici.
Forma canonica dell’equazione dell’ellisse, dell’iperbole, della parabola.
Eccentricità. Esercizi e complementi
Lezione 25 (28-10-2011)
Esercizi sulle coniche. Esercizi e complementi
Lezione 26 (28-10-2011, ore 12)
Esercizi sulla geometria
analitica del piano.
Lezione 27 (31-10-2011)
Coniche degeneri e non
degeneri. Riconoscimento di una conica tramite cambiamento di riferimento.
Invarianti. Esercizi e complementi
Lezione 28 (2-11-2011)
Spazio vettoriale V3
e identificazione con R3 tramite una
base ordinata. Base ortonormale.
Tre vettori di V3
sono linearmente dipendenti se e solo se sono complanari. Basi equiverse e contraverse. Prodotto
vettoriale. Condizione di complanarità di quattro punti ed
equazione cartesiana di un piano. Esercizi
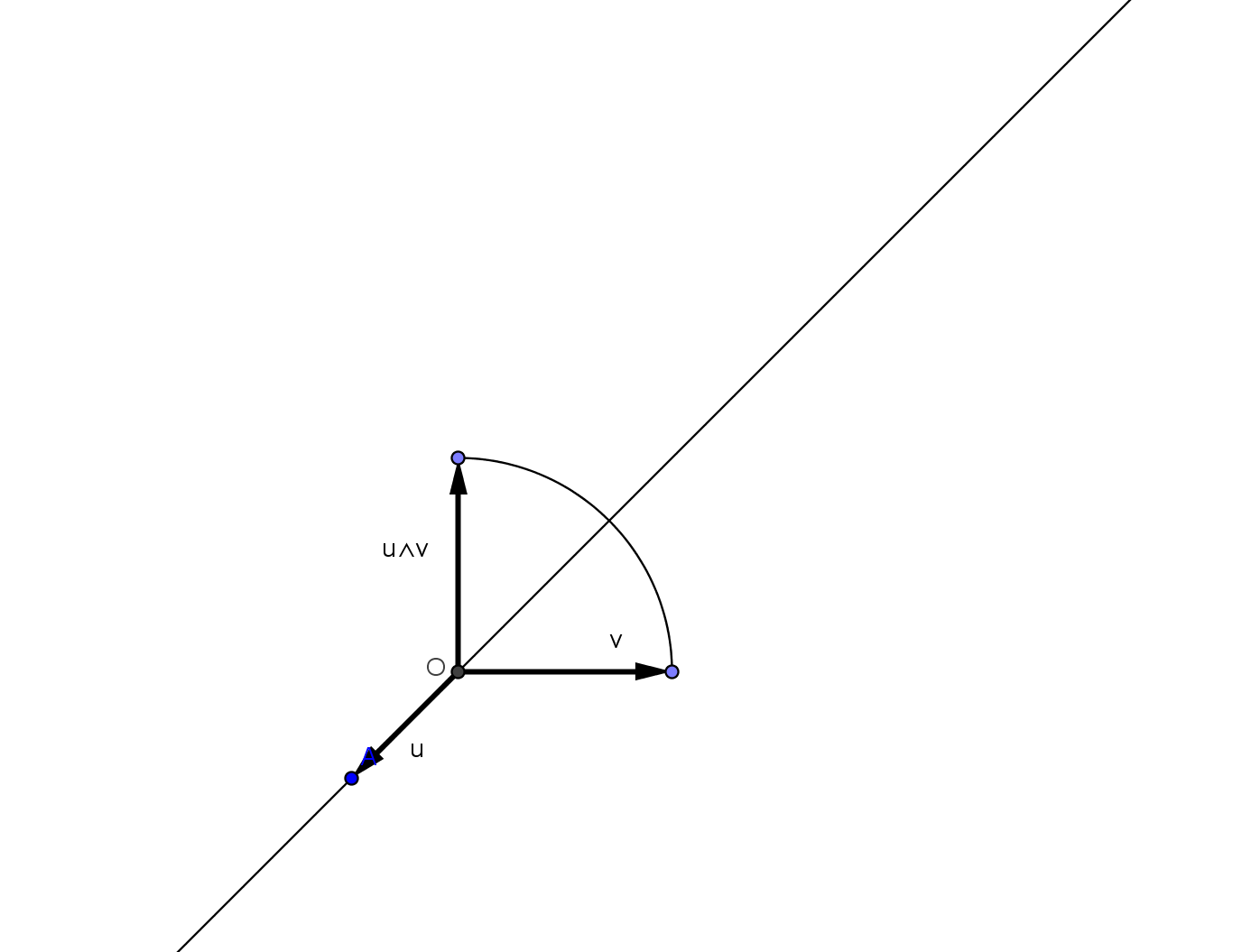
Lezione 29 (3-11-2011)
Proprietà del prodotto
vettoriale. Significato geometrico del modulo del prodotto vettoriale.
Distanza tra due rette
parallele. Equazioni parametriche di una retta nello spazio. Equazioni
cartesiane di una retta.
Lezione 30 (4-11-2011)
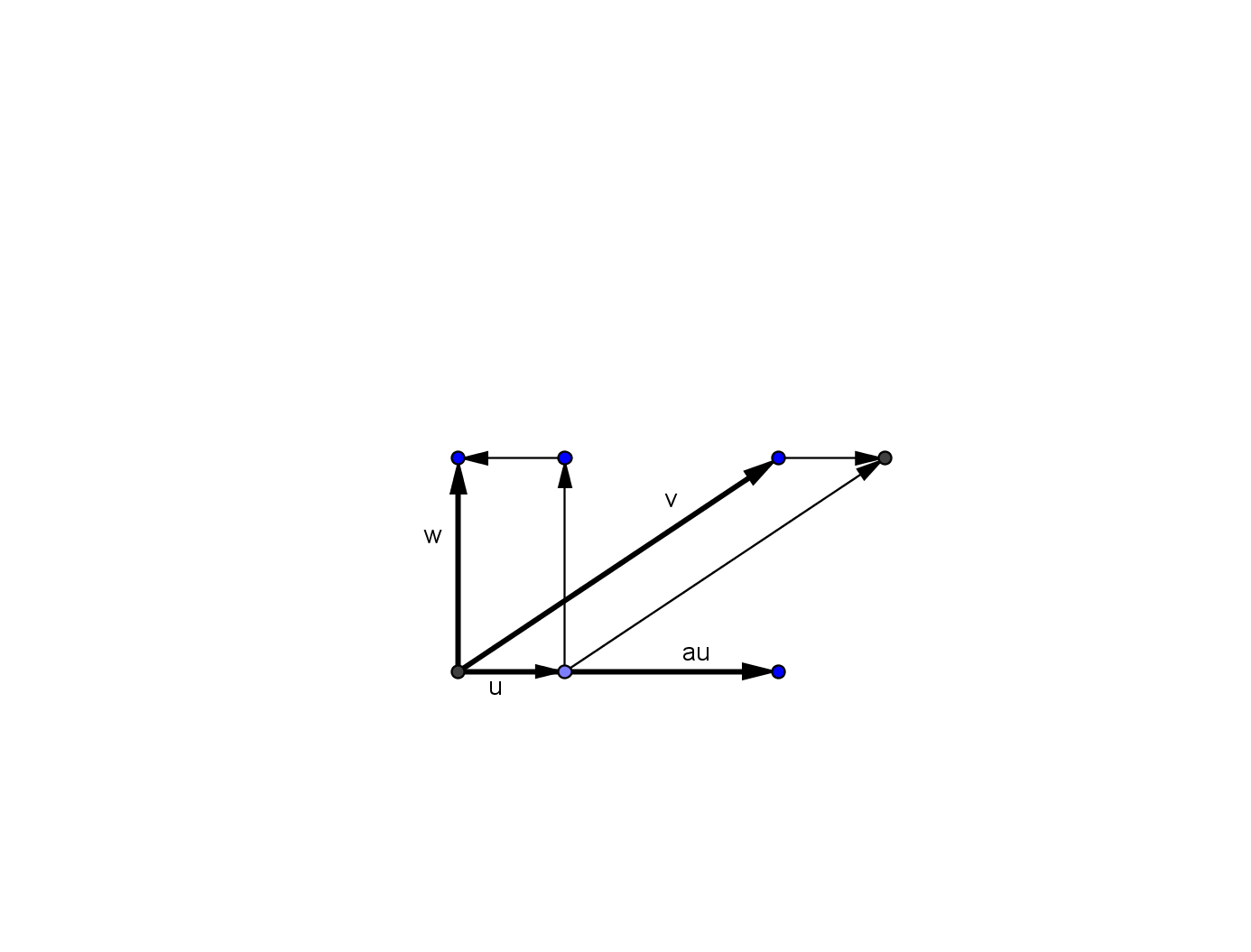
Ancora sul prodotto
vettoriale. Volume di un parallelepipedo. Significato geometrico dei parametri
di giacitura di un piano. Condizioni di parallelismo e
di perpendicolarità tra due piani. Fascio proprio e fascio
improprio di piani. Esercizi e complementi,
prodotto vett
1.png, prodotto
vett 2.png
Lezione 31 (7-11-2011)
Formule per i parametri
direttori di una retta a partire dalle equazioni
cartesiane. Condizioni di parallelismo e di perpendicolarità retta-piano. Mutue
posizioni di due rette nello spazio. Condizione
analitica di complanarità tra due rette. Distanza tra due rette parallele.
Distanza punto-piano. Complementi ed esercizi
Lezione 32 (8-11-2011)
Esercizi sulla geometria
analitica dello spazio. Sfera.
Lezione 33 (9-11-2011)
Concetto di gruppo e di
anello mediante esempi. Gruppi finiti e infiniti. Gruppo diedrale.
Gruppo delle permutazioni. Gruppo delle classi resto modulo n. Gruppi di
matrici. Anelli Z e Zn
Lezione 34 (10-11-2011)
Ancora sul concetto di gruppo
e di anello mediante esempi. Campi. Esempi di campi finiti. Gruppo dei
quaternioni. Concetto di congruenza e criteri di divisibilità.
Esercizi Disquisitiones
Arithmeticae
Lezione 35 (11-11-2011)
Concetto generale di spazio
vettoriale su un campo qualsiasi. Esempi: polinomi in una variabile, matrici,
funzioni continue, codici lineari. Esercizi
Lezione 36 (14-11-2011)
Qualche esempio di calcolo
nello spazio a quattro dimensioni.
Quattro spazi importanti
legati ad una matrice A: lo spazio delle righe, lo
spazio delle colonne, l’annullatore e l’immagine. Esercizi
Lezione 37 (15-11-2011)
Ancora sugli spazi legati ad una matrice. Relazione con i relativi spazi della forma a
scala per righe di A. Teorema del Rango: la dimensione dello spazio delle
colonne di A è uguale alla dimensione dello spazio delle righe di A.
Determinazione di una base di C(A), R(A), null(A), im(A). Dimostrazione che
im(A)=C(A). Esercizi e complementi
Lezione 38 (16-11-2011)
Dimensione
di uno spazio vettoriale. Teorema
fondamentale. Teorema di Invarianza. Lemma di Indipendenza. Teorema di
esistenza delle basi. Esercizi e Complementi
Lezione 39 (17-11-2011)
Trasformazioni lineari tra due spazi vettoriali qualunque. Esempi. Endomorfismi o
Operatori. Proprietà delle trasformazioni lineari. Estensione di una applicazione per linearità. Equazioni di una
trasformazione lineare da Rn a Rm . Nucleo e immagine di una
trasformazione lineare. Relazione con l’annullatore e l’immagine di una
matrice. Una trasformazione lineare è iniettiva se e solo se il suo nucleo è
nullo. Esercizi e complementi
Lezione 40 (18-11-2011)
Trasformazione lineare
indotta da una matrice e matrice che rappresenta una
trasformazione lineare. Esempi. Esercizi e
complementi
Lezione 41 (21-11-2011)
Una generalizzazione del
teorema di Rouché-Capelli: il teorema
delle dimensioni. (Dimostrazione facoltativa, vedi ad
esempio [2], Teorema 5.3.23.)
Isomorfismo. Isomorfismo legato ad una base
ordinata. Ogni spazio vettoriale di dimensione finita è isomorfo ad Rn .
Esercizi e complementi
Lezione 42 (22-11-2011)
Matrice di una trasformazione
lineare. Esempi. Matrice
dell’applicazione identica. Esercizi e
complementi
Lezione 43 (23-11-2011)
Ancora esempi di calcolo di
matrici di una trasformazione lineare. Definizione di matrici simili e dimostrazione
di alcune loro proprietà. Esercizi e
complementi
Lezione 44 (24-11-2011)
Relazione di similitudine tra
due matrici che rappresentano lo stesso operatore. Relazione tra la matrice di un operatore e
dell’operatore inverso. Matrice della composizione di due
operatori.
Lezione 45 (25-11-2011)
Definizione di spazio
vettoriale euclideo. Prodotto scalare astratto. Esempi.
Lezione 46 (28-11-2011)
Esempi di forme bilineari
simmetriche e definite positive o non degeneri su R2 ottenute
tramite matrici quadrate simmetriche e definite positive o invertibili. Un insieme ortogonale di vettori non nulli è
necessariamente indipendente. Definizione di base ortogonale e base
ortonormale. Espressione di un vettore in una base ortogonale
tramite i coefficienti di Fourier. Esistenza di una base ortogonale:
procedimento di ortogonalizzazione di Gram-Schmidt. Complementi
ed esercizi
Lezione 47 (29-11-2011)
Dimostrazione della
disuguaglianza di Cauchy-Schwarz. Disuguaglianza
Triangolare. Definizione di distanza in uno spazio euclideo. Formula
dello sviluppo di Fourier per la proiezione ortogonale su un sottospazio.
Esercizi e complementi
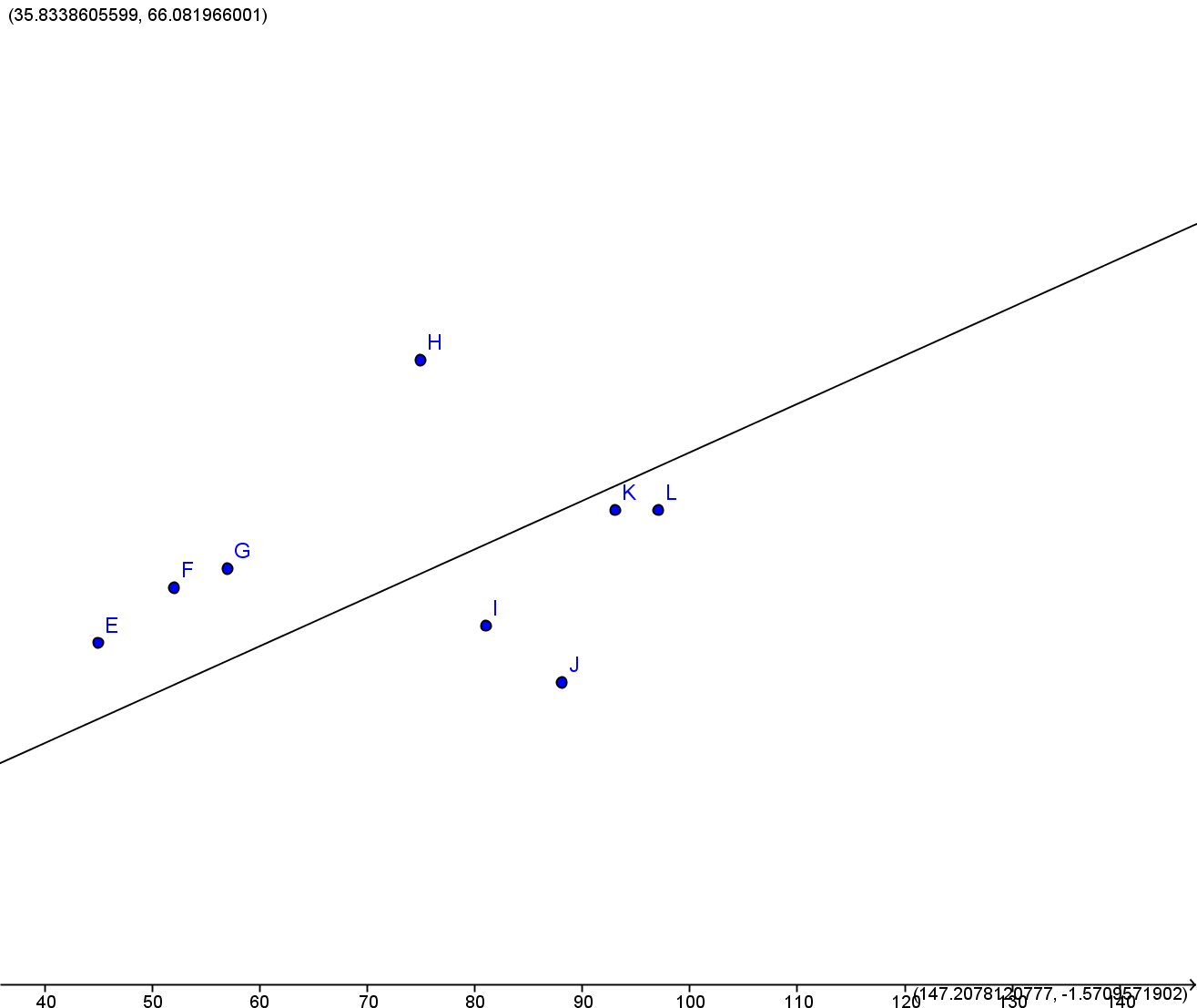
Lezione 48 (30-11-2011)
Complemento ortogonale di un
sottospazio vettoriale. Il complemento ortogonale dello spazio delle colonne di
una matrice A è l’annullatore di AT.
Teorema di approssimazione. Applicazione del teorema di
approssimazione allo studio di soluzioni approssimate di un sistema
incompatibile. Esercizi e complementi
Figura 1
Lezione 49 (1-12-2011)
Autovettori relativi ad autovalori
distinti sono linearmente indipendenti. Definizione di matrice ortogonalmente diagonalizzabile. Proprietà delle matrici simmetriche. Esercizi e Complementi
Lezione 50 (2-12-2011)
Diagonalizzazione di matrici simmetriche. Condizioni necessarie e
sufficienti affinché una matrice sia ortogonale. Teorema degli Assi Principali.
Esercizi
Lezione 51 (2-12-2011) Simulazione d’esame nel
pomeriggio:14:30-17:30
Lezione 52 (5-12-2011) Dimostrazione del Teorema degli Assi Principali. Applicazione alla diagonalizzazione
delle forme quadratiche. Riconoscimento di una conica a
partire dagli autovalori della relativa forma
quadratica. Esercizi
Lezione 53 (6-12-2011)
Esercizi sull’applicazione
del Teorema degli assi principali. Forma quadratica definita positiva. Matrice
definita positiva. Criterio dei minori principali (senza dimostrazione).
Lezione 54 (7-12-2011)
Esercizi sui prodotti scalari
generali
Lezione 55 (12-12-2011)
Esercitazione
Esercizi
Approssimazione
di Fourier Grafico
delle prime approssimazioni della funzione x2
Lezione 56 (13-12-2011)
Esercitazione
Lezione 57 (14-12-2011)
Esercitazione
Lezione 58 (15-12-2011)
Esercitazione
Lezione 59 (16-12-2011)
Esercitazione
Lezione 60 (19-12-2011)
Esercitazione
Buon Natale e Buon Anno.
Bibliografia
1. S. Capparelli – A. Del Fra: Geometria, Esculapio, 2010
2. W. Keith Nicholson, Algebra Lineare, dalle applicazioni alla teoria, McGraw-Hill 2002
3. P. Maroscia: Geometria e Algebra Lineare, Zanichelli, 2002
4. E. Schlesinger: Algebra Lineare e Geometria, Zanichelli, 2011
5. M. Bordoni: Geometria Analitica, Esculapio, 2001
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}