Diario delle lezioni (AA10-11)
In questo spazio saranno annotati, più o meno quotidianamente e per sommi capi, gli argomenti svolti a lezione. Tra parentesi quadre i riferimenti alla bibliografia. Gli studenti sono invitati a risolvere gli esercizi proposti e, volendo, sottoporre a me, via posta elettronica, delle soluzioni da condividere, su questa pagina, con gli altri studenti del corso. Le soluzioni possono anche essere scritte a mano, ma in ogni caso devono essere scritte in maniera ordinata e leggibile. Vi ringrazio inoltre se vorrete segnalare eventuali imprecisioni o errori sia su queste pagine che sul libro di testo.
Lezione 1 (18-10-2010)
Richiami su insiemi e
operazioni su insiemi. Prodotto cartesiano di due insiemi. Corrispondenze,
Relazioni. Relazioni d’equivalenza e d’ordine. Classi d’equivalenza, partizioni
di un insieme. Funzioni o applicazioni. Applicazioni iniettive, suriettive,
biiettive. [1, Cap.1]. Esercizi Soluzioni
Lezione 2 (19-10-2010)
Rn come spazio vettoriale. Otto proprietà fondamentali
dello spazio vettoriale. Combinazione lineare. Sottospazio vettoriale di Rn. Sottospazio generato da
alcuni vettori. Dipendenza e indipendenza lineare. [1, Cap.2]. Esercizi
Lezione 3 (20-10-2010)
Basi di un sottospazio
vettoriale. Dimensione di un sottospazio. Alcuni richiami elementari sui
sistemi di equazioni lineari. Matrice di un sistema e matrice completa di un
sistema. [1. Cap 2]. Esercizi
Lezione 4 (21-10-2010)
Matrici. Addizione di
matrici. Moltiplicazione per uno scalare. Trasposizione. Equazioni lineari.
Sistemi di equazioni lineari. Il metodo di eliminazione di Gauss. [2. Paragrafi
1.1,1.2].
Moltiplicazione di matrici.
Proprietà della moltiplicazione di matrici. Moltiplicazione di matrici e
sistemi lineari. [2. Paragrafo 1.4]
Esercizi
(Per il metodo di eliminazione di Gauss e la riduzione a gradini di una matrice
può essere utile il sito http://www.math.odu.edu/~bogacki/lat/)
Lezione 5 (22-10-2010)
Metodo di eliminazione di
Gauss-Jordan. Riduzione a gradini di una matrice (sistema) tramite operazioni
elementari. Forma a scala ridotta di una matrice. Rango di una matrice come
numero dei pivot. Teorema di Rouché-Capelli. [ 2, Paragrafi 1.2,1.4] [1,
Paragrafo 4.6] Esercizi
Lezione 6 (25-10-2010)
Sistemi lineari omogenei.
Soluzioni base. Autosoluzioni. L’insieme delle soluzioni di un sistema lineare
omogeneo costituisce un sottospazio. L’insieme delle soluzioni di un sistema
lineare non omogeneo costituisce un sottospazio affine.
Prodotto a blocchi tra
matrici. [2, Paragrafi 1.3, 1.4] Esercizi
Lezione 7 (26-10-2010)
Trasposta del prodotto di due
matrici. Matrice identità. Definizione di matrice invertibile. Formula per la
matrice inversa di una matrice 2x2. Risoluzione mediante regola di Cramer di un
sistema 2x2. Algoritmo di Gauss per calcolare l’inversa di una matrice.
[2, Paragrafi 1.4, 1.5] [1, Paragrafo 4.3] Esercizi
Lezione 8 (27-10-2010)
Ancora sull’algoritmo di inversione.
Esempi. Una matrice è invertibile se e solo se ha rango massimo. Proprietà
della matrice inversa. Principio di
induzione matematica. Definizione di matrici elementari. [2, Paragrafo 1.5,
Appendice A2; 1, Paragrafo 3.7]. Esercizi
Lezione 9 (28-10-2010)
Le matrici elementari sono
invertibili ed ogni matrice invertibile è il prodotto di matrici elementari.
Condizioni equivalenti per l’invertibilità di una matrice quadrata. [2,
Paragrafi 1.5, 1.6] Esercizi
Lezione 10 (29-10-2010)
Decomposizione LU di una
matrice. Definizione di determinante. Complemento algebrico. Regola di Sarrus
per il calcolo di determinanti 3x3. Sviluppo di Laplace. Primo Teorema di
Laplace. Determinante di una matrice triangolare. [2, Paragrafi 1.7, 2.1.1; 1,
Paragrafi 3.3, 3.4] Esercizi Soluzioni
(fornite da uno studente).
Lezione 11 (2-11-2010)
Operazioni elementari e determinanti.
Il teorema di Binet (o del prodotto) e sua dimostrazione mediante le matrici
elementari.
[2, Paragrafi 2.1.2, 2.2.1] Esercizi
Lezione 12 (3-11-2010)
Determinante di una matrice
triangolare a blocchi. Determinante della matrice trasposta. Una matrice è
invertibile se e solo se ha determinante diverso da zero. Aggiunta di una
matrice. Formula di aggiunzione. Formula per la matrice inversa. Applicazione
della formula per l’inversa alla soluzione di sitemi di equazioni lineari:
Regola di Cramer. [2, 2.2] Esercizi Soluzioni (fornite da una studentessa).
Lezione 13 (4-11-2010)
Esercitazioni e ripasso.
Lezione 14 (5-11-2010)
Esercitazioni e ripasso.
Lezione 15 (8-11-2010)
Minore di una matrice. Rango
per minori. Teorema degli orlati (dimostrazione omessa). Spazio delle righe di
una matrice A (Row(A)). Spazio delle colonne di A (Col(A)). Rango per righe e
rango per colonne. Teorema dell’equivalenza delle varie definizioni di rango
(dimostrazione omessa). [1, paragrafo 3.6. 2, 4.4.1, parte del 4.4.2] Esercizi
Lezione 16 (9-11-2010)
Vettori applicati. Vettori
liberi. Operazioni sui vettori liberi. Spazio vettoriale V2.
Rappresentazione cartesiana dei vettori del piano.
Condizione di parallelismo di
due vettori. [1, 6.1-6.6] Esercizi
Lezione 17 (10-11-2010)
Prodotto scalare e sue proprietà.
Perpendicolarità tra vettori. Coseno dell’angolo tra vettori. Coefficiente di
Fourier di un vettore rispetto ad un altro. Proiezione ortogonale di un vettore
su una retta. Condizione di allineamento di tre punti. Equazione cartesiana di
una retta. Equazioni parametriche di una retta. Parametri direttori. Condizione
di perpendicolarità tra due rette. [1, 6.7, 6.8, 6.10, 6.11, 6.14, 6.15] Esercizi Soluzioni
(fornite da uno studente)
Lezione 18 (11-11-2010)
Formula per l’area di un
triangolo. Posizioni reciproche di due rette. Fascio improprio di rette e
fascio proprio. [1,6.9, 6.12, 6.13] Esercizi Soluzioni
(fornite da uno studente).
Lezione 19 (12-11-2010)
Coseni direttori e loro
significato geometrico. Angolo tra rette orientate. Formula per la distanza
punto-retta. [1, 6.14, 6.16] Esercizi
Lezione 20 (15-11-2010) Cambiamenti di riferimento in V2, trasformazioni lineari in V2. [1,
6.17, 6.18] [2, 3.5] Esercizi (V. anche Figura per esercizio 4.)
(N.B. Le lezioni del 16 e 17
si sono tenute regolarmente.)
Lezione 21 (16-11-2010) Esempi
di trasformazioni lineari su V2 e
su R2. Introduzione alle
curve algebriche del secondo ordine: Coniche. Equazione di una circonferenza.
[1, 6.18, 6.19] Esercizi Soluzioni
(parziali) (fornite da uno studente).
Lezione 22 (17-11-2010) Calcolo
dell’equazione della tangente in un punto di una circonferenza. Definizione di ellisse in forma canonica,
equazione cartesiana, fuochi, direttrici, eccentricità. Due definizioni
equivalenti come luogo dei punti. [1,6.20] (Per il disegno delle coniche può essere utile, oltre a Geogebra (http://www.geogebra.org/cms/) anche il
seguente: http://cs.jsu.edu/~leathrum/Mathlets/conics.html). (Figura dinamica
per l'eccentricita' dell'ellisse) (Vedere anche http://science.nasa.gov/science-news/science-at-nasa/2001/ast03jul_1/
)
Esercizi
Soluzioni (1) Soluzioni (2)
Lezione 23 (18-11-2010) Equazione canonica dell’iperbole e della parabola.
Coniche come luogo di punti. Coniche traslate.[1, 6.21, 6.22] Esercizi
Lezione 24 (19-11-2010) Esercizi su coniche in forma canonica, coniche
traslate. Un esempio di conica ruotata. Esercizi su riflessioni del piano e
composizione di trasformazioni. Esercizi Soluzioni
Lezione 25 (22-11-2010) Introduzione alla geometria
dello spazio tridimensionale. Sistema di riferimento RC(O,x,y,z). Prodotto
scalare. Basi equiverse e contraverse. Condizione di complanarità di tre
vettori. Prodotto vettoriale: definizioni e proprietà. Formula per il calcolo
del prodotto vettoriale. Equazione cartesiana di un piano. [1, Cap. 8] Esercizi Soluzioni
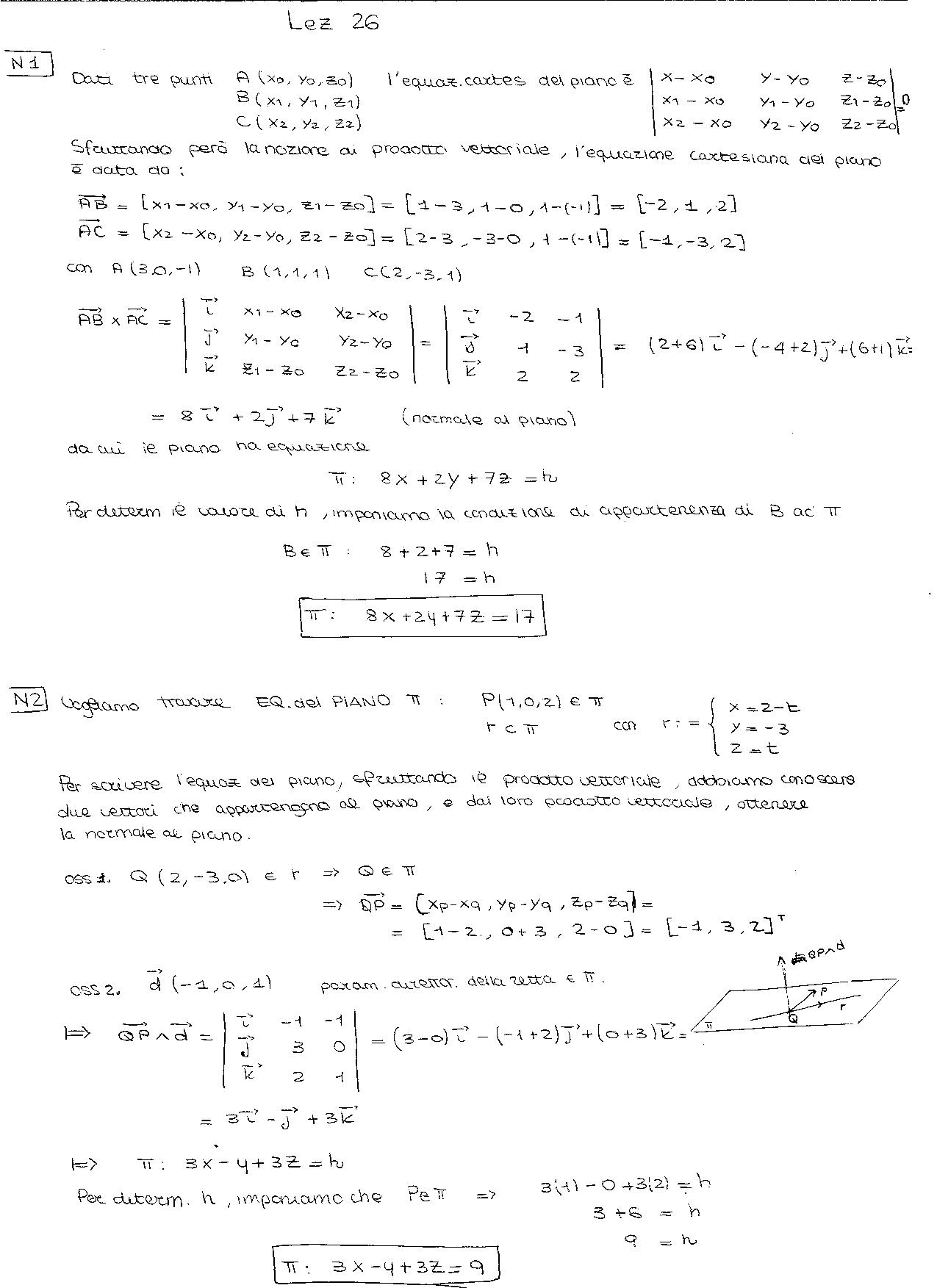
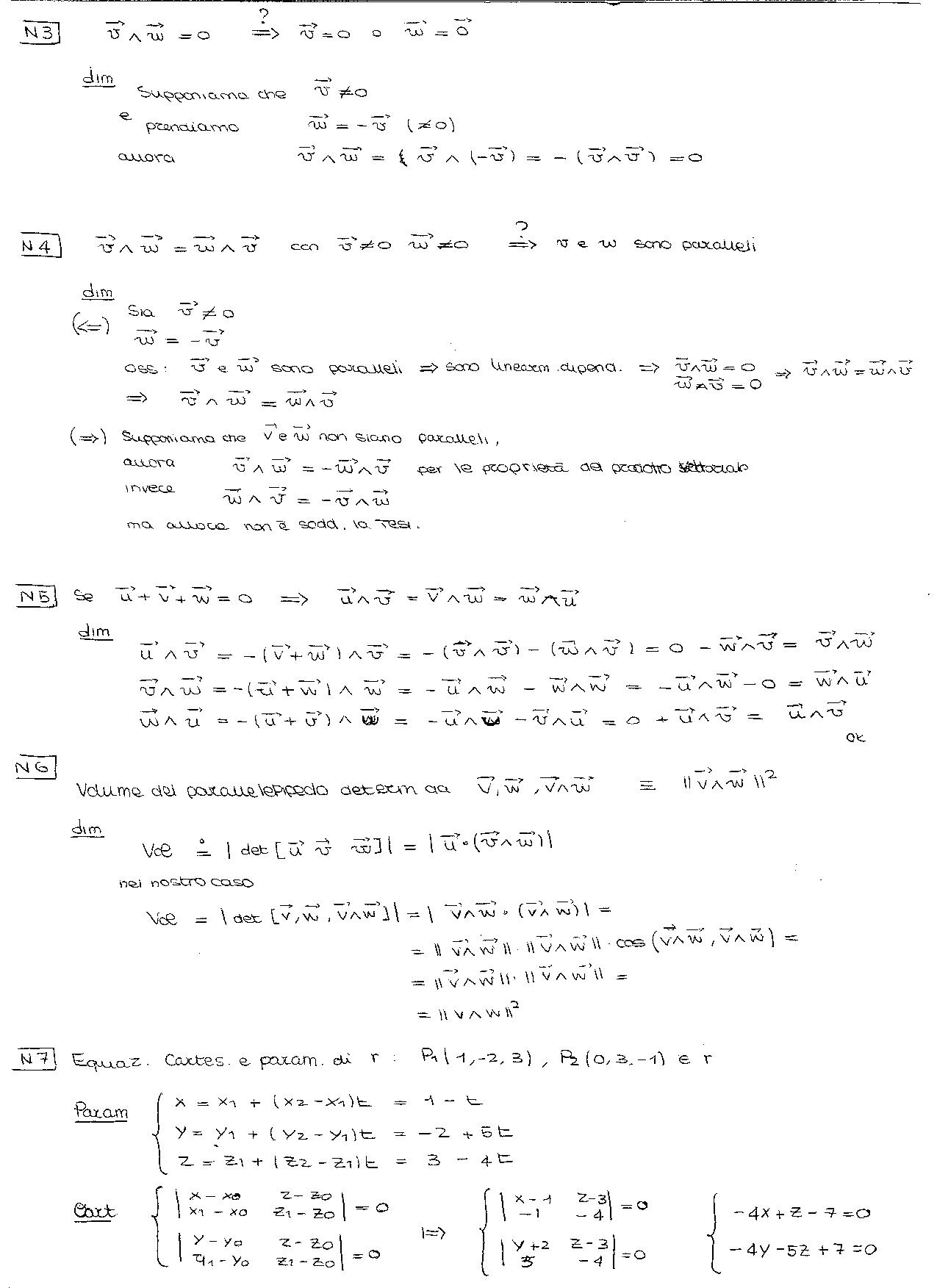
Lezione 26 (23-11-2010) Significato geometrico del
prodotto vettoriale. Prodotto misto e suo significato geometrico: Calcolo del
volume di un parallelepipedo. Posizioni reciproche tra piani. Condizione di
parallelismo tra piani. Equazioni cartesiane di una retta. Equazioni
parametriche di una retta. Passaggio da equazioni cartesiane a equazioni
parametriche. [1, Cap. 8] Esercizi Soluzioni1 Soluzioni 2
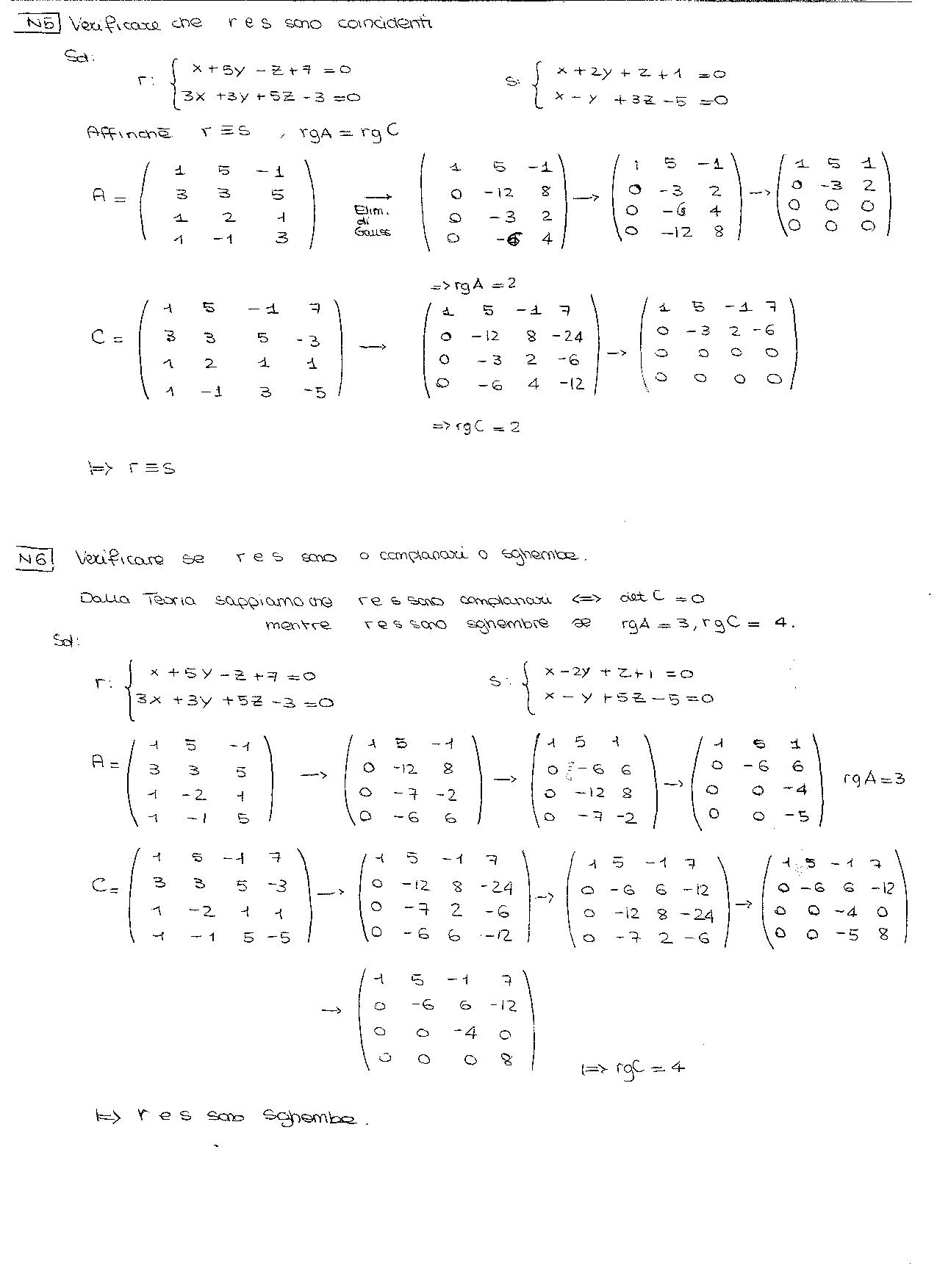
Lezione 27 (24-11-2010) Calcolo dei parametri direttori di una retta data in
forma cartesiana. Significato geometrico dei coefficienti dell’equazione
cartesiana del piano. Condizioni di parallelismo retta-piano. Posizioni
reciproche di due rette. Condizione di parallelismo di due rette. Rette
sghembe: condizione analitica affiché due rette siano sghembe. [1, Cap. 8] Esercizi
Soluzioni 1 Soluzioni 2
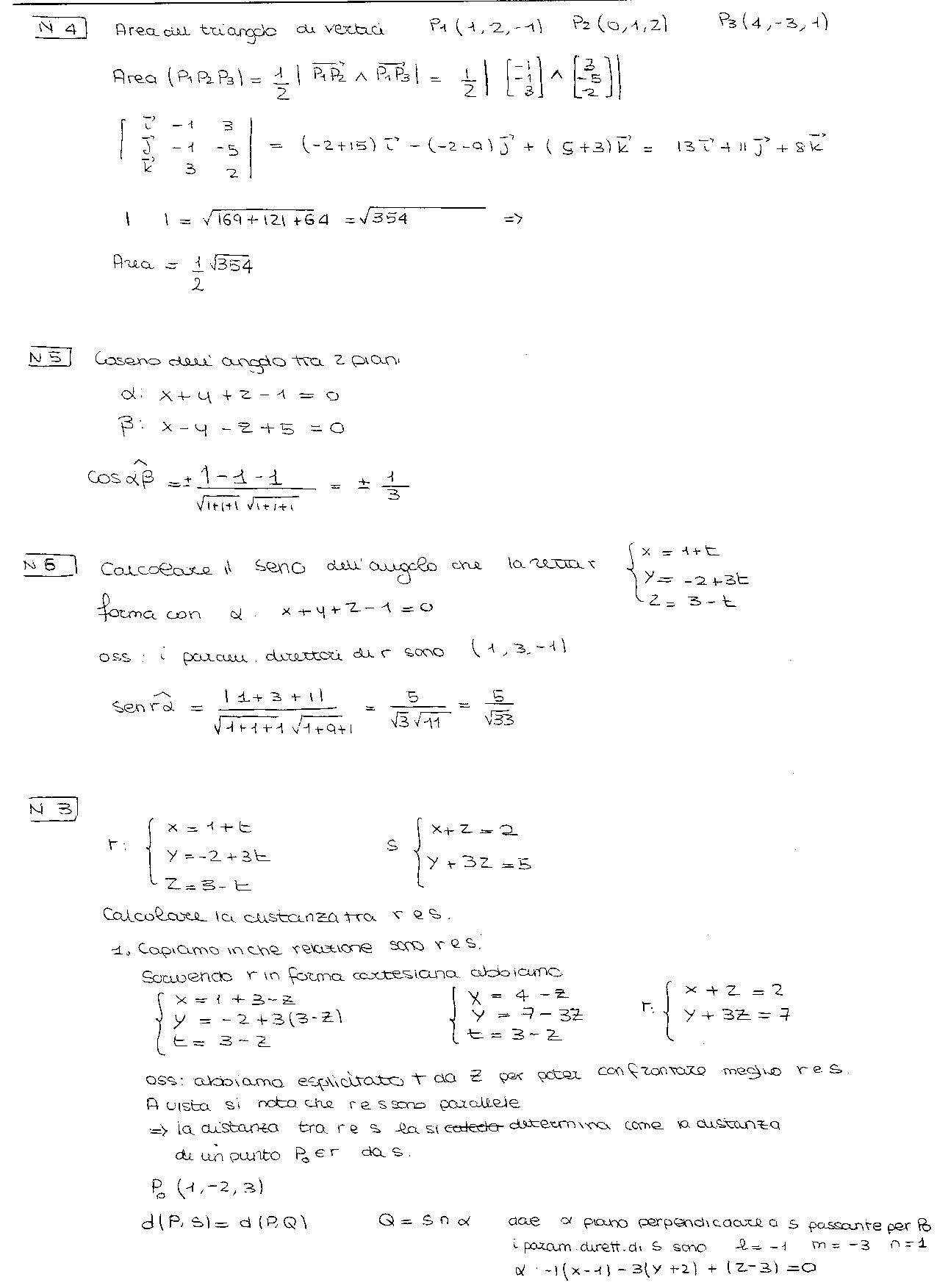
Lezione 28 (25-11-2010) Fascio di piani. Formula per la distanza punto-piano.
Distanza tra due rette sghembe. Retta di minima distanza. Distanza tra due
piani. [1, Cap. 8] Esercizi Soluzioni
1 Soluzioni 2
Lezione 29 (26-11-2010) Angoli tra retta e piano,
tra due piani. Distanza punto-retta, distanza tra rette parallele. Equazione
cartesiana della sfera. [1, Cap 8] Esercizi Soluzioni 1 Soluzioni 2 Soluzioni 3
Lezione 30 (29-11-2010) Introduzione alle strutture algebriche astratte.
Cenni a gruppi e simmetrie. Anelli e campi. Gruppo delle simmetrie di un
triangolo equilatero. Gruppo delle classi resto modulo n. Qualche esempio di
anelli e campi. [1, Cap. 10] Esercizi
Lezione 31 (30-11-2010) Esercitazione e ripasso. Soluzioni
degli esercizi della lezione 30
Lezione 32 (1-12-2010) Definizione generale di uno spazio vettoriale su un
campo K. Esempi. Alcune proprietà elementari. Dipendenza e indipendenza
linerare. Generatori e base di uno spazio vettoriale. [1, 11.1,11.2,11.3] [2,
5.1] Esercizi
Lezione 33 (2-12-2010) Sottospazi di uno spazio vettoriale. Equazioni
cartesiane di un sottospazio di Rn. Teorema di esistenza di una base
(dimostrazione solo nel caso di spazi finitamente generati). [1, 11.4, 11.5] Esercizi
Lezione 34 (3-12-2010) Varie caratterizzazioni del concetto di base: Un
insieme di vettori B è una base se e solo se ogni vettore si scrive in uno ed
un solo modo come combinazione
Lineare di vettori di B. Base
come insieme minimale di generatori e come insieme massimale di vettori
linearmente indipendenti. Conseguenze: teorema di invarianza. [1, 11.5] Esercizi
Lezione 35 (6-12-2010) Spazi vettoriali euclidei: Rn con prodotto
scalare canonico. Insieme ortogonale. Base ortogonale. Sviluppo di Fourier.
Esistenza di una base ortogonale: Procedimento di Gram-Schmidt. [2, 4.5] [1,
15.1] Esercizi
Lezione 36 (7-12-2010)
Un esempio per motivare la diagonalizzzazione
Definizione di matrice diagonalizzabile. Definizione di autovalori e autovettori,
autospazio. Polinomio caratteristico di una matrice. Gli autovalori come radici
del polinomio caratteristico. [2, 2.3.1, 2.3.2, 2.3.3] [1, 14] Esercizi
Lezione 37 (9-12-2010)
Esempi di matrici non
diagonalizzabili. Legame tra la diagonalizzabilità di una matrice e l’esistenza
di autovettori. Una matrice è diagonalizzabile se e solo se esiste una base di
Rn costituita da autovettori di A. Matrici simili. Due matrici
simili hanno lo stesso polinomio caratteristico. Autovettori relativi ad
autovalori distinti sono linearmente indipendenti. Molteplicità algebrica e molteplicità
geometrica di un autovalore. Criterio necessario e sufficiente per la
diagonalizzabilità. [2, 4.7.1]Esercizi
Lezione 38 (10-12-2010)
La molteplicità geometrica di
un autovalore è sempre minore o uguale alla molteplicità algebrica. Dimostrazione del criterio necessario e
sufficiente per la diagonalizzabilità. [2, 4.7.1]Esercizi
Lezione 39 (13-12-2010)
Diagonalizzazione ortogonale.
Una matrice è ortogonalmente diagonalizzabile se e solo se esiste una base
ortonormale costituita da autovettori.
Enunciato del teorema degli assi principali. Proprietà delle matrici simmetriche.
[2, 4.7.2] [1, 15.2] Esercizi
Lezione 40 (14-12-2010)
Dimostrazione del teorema
degli assi principali. Definizione di forma quadratica e legame con le matrici simmetriche.
Esempio di applicazione del teorema degli assi principali. [2, 4.7.3, 4.8.1] Esercizi
Lezione 41 (15-12-2010)
Diagonalizzazione di forme
quadratiche. Cambio di variabili. Applicazione alle coniche. [2, 4.8.1] Esercizi
Lezione 42 (16-12-2010)
Trasformazioni lineari da Rn
a Rm. Endomorfismi. Esempi. Equazioni di una trasformazione lineare.
Matrice standard di una trasformazione lineare. [2, 4.9.1] [1, 5.1] Esercizi
Lezione 43 (17-12-2010)
Trasformazioni lineari da uno
spazio vettoriale V ad uno spazio vettoriale W. Esempi. Esistenza ed unicità di
una trasformazione lineare assegnata una base di V e dei corrispondenti vettori
di W. Nucleo e Immagine di una trasformazione lineare. Una trasformazione
lineare è iniettiva se e solo se il suo nucleo è zero. Una trasformazione
lineare è suriettiva se e solo se la sua immagine coincide con W. Isomorfismi.
[2, 5.3.1, 5.3.2] [1,12.3, 12.4] Esercizi
Lezione 44 (10-1-2011)
Teorema delle Dimensioni e
suo legame con il teorema di Rouché-Capelli. Corollario del Teorema: caso in
cui iniettività equivale a suriettività. [2, 5.3.3]
[1, 12.4, 12.5, 12.6] Esercizi
Lezione 45 (11-1-2011)
Coordinate di un vettore
rispetto ad una base. Matrice del cambiamento di coordinate. Metodo di calcolo
della matrice del cambiamento di coordinate.
[2, 5.4.3] Esercizi
Lezione 46 (12-1-2011)
Matrice di una trasformazione
lineare tra due spazi vettoriali qualunque. Teorema sulla matrice della
composizione di due applicazioni lineari. Matrice di un endomorfismo. [1, 12.7,
12.8, 12.9] [2, 5.4.4] Esercizi
Lezione 47 (13-1-2011)
Relazione tra due matrici di
uno stesso endomorfismo: similitudine. Diagonalizzazione di un
endomorfismo. [2, 5.5] Esercizi
Lezione 48 (13-1-2011)
Esercitazione.
Lezione 49 (14-1-2011)
Prodotti scalari astratti.
Spazi euclidei: vari esempi. [2, 5.7.1, 5.7.2] Esercizi
Lezione 50 (17-1-2011)
Disuguaglianza di Cauchy.
Algoritmo di Gram-Schmidt. Approssimazione di Fourier. Polinomi di Legendre.
[2, 5.7.2, 5.7.3, 5.7.4] Esercizi
Lezione 51 (19-1-2011)
Teorema dell’approssimazione.
Applicazioni. Approssimazione di Fourier. Problema di Basilea. [2, 5.7.3,5.7.4,
5.7.5] Esercizi Approssimazione di Fourier Grafico delle prime
approssimazioni della funzione x quadro
Lezione 52 (21-1-2011)
Esercitazione
Lezione 53 (24-1-2011)
Esercitazione Esercizi (risolti)
Lezione 54 e 55 (25-1-2011)
Esercitazione Esercizi
Lezione 56 (26-1-2011)
Esercitazione
Lezione 57 (12-13:30) (28-1-2011)
Esercitazione
Lezione 58 e 59 (16-18:30) (28-1-2011)
Esercitazione
Lo scritto del 25 febbraio si
terrà a partire dalle ore 9 (per una durata di tre ore) nell’aula 12 di Via
Scarpa. Saranno ammessi solo gli studenti prenotati. Portare un documento di
identità, penna e fogli protocollo.
Bibliografia
1. S. Capparelli – A. Del Fra: Geometria, Esculapio, 2010
2. W. Keith Nicholson, Algebra Lineare, dalle applicazioni alla teoria, McGraw-Hill 2002
3. P. Maroscia: Geometria e Algebra Lineare, Zanichelli, 2002
1. M. Bordoni: Geometria Analitica, Esculapio, 2001
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}